How to teach a robot to screw
In the pantheon of technologies that make our modern society possible, one of the most underappreciated and neglected is the threaded fastener, more commonly known as the screw. This technology emerged at the dawn of the industrial era, when it became possible to make metal gadgets like these on a large scale.
Today, these devices literally hold the world together. Our 21st-century lifestyles would not be possible without them, and they are likely to play an indispensable role for the foreseeable future.
Yet in a world where manufacturing techniques are increasingly automated, there is a problem. The process of screwing and unscrewing is still one in which humans outperform machines. Robotic devices have difficulty locating screws and their sockets and then manipulating screws and screwdrivers effectively.
Enter Dima Mironov and colleagues at the Skolkovo Institute of Science and Technology in Moscow, who want to automate the process for the smart factories of the future.
Their plan is simple. Using haptics, the study of the sense of touch, Mironov and co want to understand how humans perform these tasks and then build robots that use the same technique. And their work has uncovered a fundamental law of screwing (and unscrewing) that is beginning to make this possible.
Humans use two different types of force to drive home a screw or release it. They first apply a pressure or axial force to push the screw into its socket. They also apply a turning force, or torque, to turn the screw. The required torque depends on friction between the screw and the socket material, and this also depends the state of the thread.
A key problem in screwing is how to avoid cam-outs, in which the screwdriver loses its grip on the screw head and slips. So Mironov and co are particularly interested in how humans avoid this.
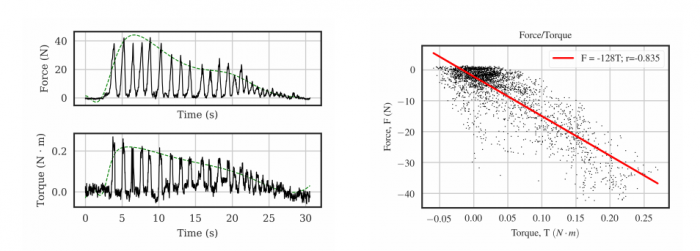
To investigate, the team built a device to measure both the axial force and the torque to resolutions of less than 0.1 newtons in the axial direction and 0.003 newton-meters of torque.
They then asked 10 men and women to repeatedly drive a small screw—the kind used in smartphone assembly—into a three-millimeter socket. The screws had either a Phillips head or a hex head. The team then measured the forces involved.
It turns out that for successful screwing and unscrewing, humans apply an axial force that is proportional to the torque. During screwing, this force reaches a maximum at the end of the drive; this pattern reverses during unscrewing.
There is also a periodicity to these forces that comes from humans changing their grip as they turn their hands and re-engage with the screw. So Mironov and co simply look at the maximum force exerted during each turn.
This is how they found the universal pattern of screwing and unscrewing forces that can successfully drive home a screw or remove it. “Results show that people apply axial force to the screws to avoid screwdriver slippage (cam-outs) and this axial force is proportional to the torque which is required for screwing,” say Mironov and co.
The team also found that the required force depends on the type of screw head: screws with a Phillips head require significantly more axial force to avoid cam-outs than screws with a hex head. So given the same axial force, hex heads are less likely to slip than Phillips heads.
Finally, Mironov and co programmed a robot to re-create the same pattern of forces. This robot is equipped with a screwdriver, a gripper to hold the screw, and machine vision to locate the screw in its socket.
The team then measured the forces as the robot did its work, paying particular attention to cam-outs, which show up as a sudden drop in the forces. When it detects a cam-out, the robot increases the axial force and continues.
The robot performed well. “The results of the robotic unscrewing agree with the results of the human experiments and demonstrate the universality of the conditions of the successful unscrewing,” say Mironov and co.
These researchers are part of a team building robots that can take apart electronic devices, like smartphones, for recycling. The project is called RecyBot, and its goal is to create a high-speed intelligent robotic system for dismantling electronics.
That’s a considerable challenge, and one of the biggest headaches is unscrewing. So the team at least have this under their belt. But the same technology could be applied in a wide range of smart factories that have to assemble and disassemble components.
Either way, the humble screw looks set to play just as important a role in the future as it has in the past.
Ref: arxiv.org/abs/1801.10386 : Haptics of Screwing and Unscrewing for Its Application in Smart Factories for Disassembly
Deep Dive
Artificial intelligence
Large language models can do jaw-dropping things. But nobody knows exactly why.
And that's a problem. Figuring it out is one of the biggest scientific puzzles of our time and a crucial step towards controlling more powerful future models.
Google DeepMind’s new generative model makes Super Mario–like games from scratch
Genie learns how to control games by watching hours and hours of video. It could help train next-gen robots too.
What’s next for generative video
OpenAI's Sora has raised the bar for AI moviemaking. Here are four things to bear in mind as we wrap our heads around what's coming.
Stay connected
Get the latest updates from
MIT Technology Review
Discover special offers, top stories, upcoming events, and more.